
 español
español








 Sistema de montaje en tierra
Sistema de montaje en tierra sistema de montaje en techo
sistema de montaje en techo
 Sistema de montaje de cochera
Sistema de montaje de cochera sistema de montaje de granja
sistema de montaje de granja
 Easy Solar Kit
Easy Solar Kit sistema de seguimiento solar
sistema de seguimiento solar
 inversor solar
inversor solar
 Accesorios solares
Accesorios solares
Directrices para el uso de robots fotovoltaicos de limpieza-B30M2
El robot de limpieza fotovoltaico es simple y conveniente de usar. Aprendamos sobre su guía de uso a continuación.
1. Escenarios de uso admitidos
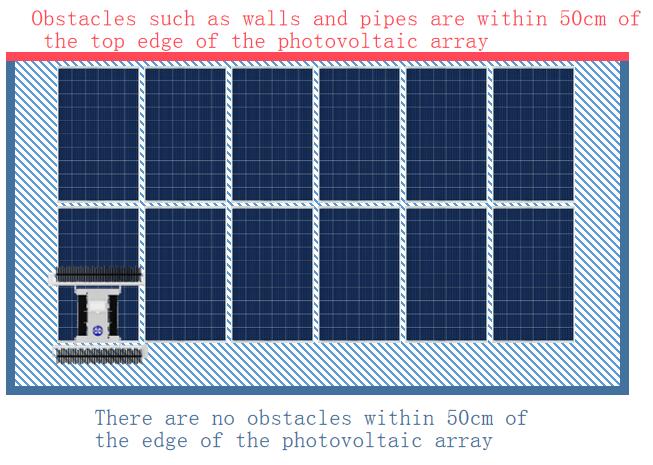
Aviso:
2.1Comprobar antes de usar
2.1.1 Verifique la limpieza de la superficie de la pista para evitar una reducción significativa en el agarre. (Está prohibido levantar la parte suspendida de la parte superior de la vía para evitar que los ejes delantero y trasero se deformen y dañen)

2.1.2 Verifique si hay un objeto extraño debajo del sensor anticaída para evitar que el sensor anticaída sea anormal. (Está estrictamente prohibido ser exprimido por fuerza externa)

2.1.3 Verifique el desperdicio del algodón perlado autolimpiante y observe si el lado del algodón perlado autolimpiante está cerca de la pista, para evitar que el agarre de la pista se reduzca considerablemente.

2.1.4 Verifique la limpieza de la superficie de succión en la parte inferior de la ventosa del conjunto de la ventosa central y asegúrese de que esté limpia para evitar que la fuerza de agarre se reduzca considerablemente y afecte la seguridad de la operación.

2.1.5 Verifique la limpieza de la lente de la cámara de la caja de exposición y su cuerpo de caja, y si el cepillo de sombreado cubre completamente el área del plano de proyección de la caja de exposición para evitar que la luz solar y el polvo interfieran con la cámara.

2.1.6 Verifique el tipo de ensamblaje del cepillo giratorio y si está deformado para evitar que afecte el efecto de limpieza.

2.2Selección de lugar
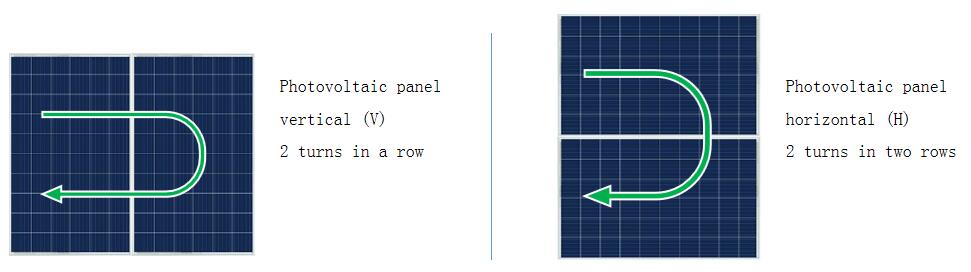
2.2.1 (Número de vueltas) es igual a (Número de vueltas por fila) multiplicado por (Número de filas de matriz relativas).
2.2.2Seleccione el dispositivo que mira hacia el lado más largo (parte superior) de la matriz fotovoltaica como punto de partida, de modo que se pueda minimizar el número de vueltas en la operación autónoma horizontal y maximizar la eficiencia.
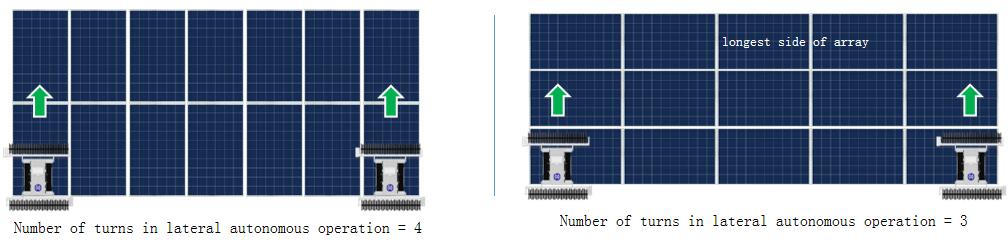
2.2.3 Generalmente, se utiliza como extremo inicial el lado que sea conveniente para el manejo y operación del equipo, es decir, el extremo inferior del arreglo.
2.3 Dispositivo de arranque
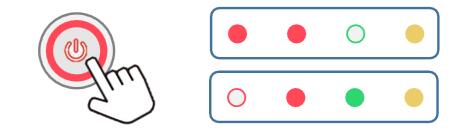
2.3.1 Encendido
Presione el botón de encendido para iniciar el dispositivo, y cuando la primera luz roja se apague, el dispositivo es normal y entra en el estado de inicialización.
2.3.2 Calibración de posición
Ajuste el eje central lateral del dispositivo para alinearlo con la línea de separación entre las celdas de la segunda fila y la tercera fila en la esquina inferior, y alinee el eje central longitudinal con la línea de separación entre las celdas de la tercera y cuarta columna en la esquina inferior
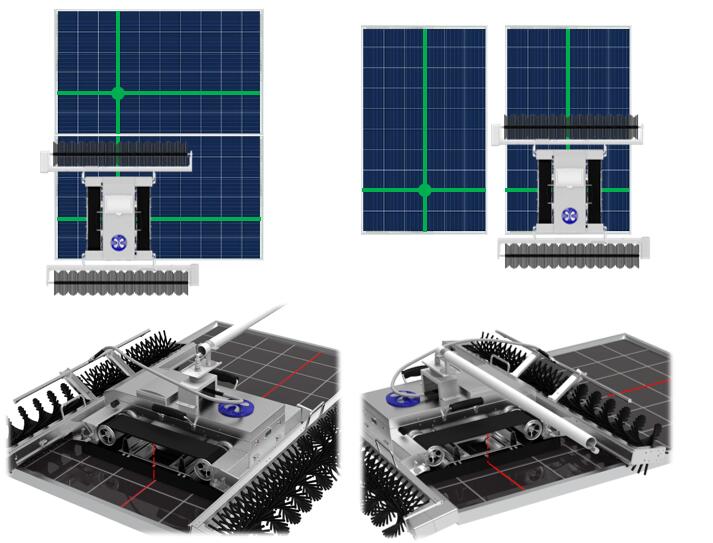
*La placa de soporte izquierda de la rueda de sincronización tiene una posición de orificio para indicar la posición central, lo que puede ayudar a la calibración de la posición.
2.3.3Comenzar a trabajar
Cuando la luz verde siempre está encendida, la luz roja siempre está apagada (el zumbador suena una vez) y la inicialización es exitosa (alrededor de 22 s), puede presionar el botón de inicio/espera para que el dispositivo comience a funcionar de forma independiente.

2.4 Aplicación funcional
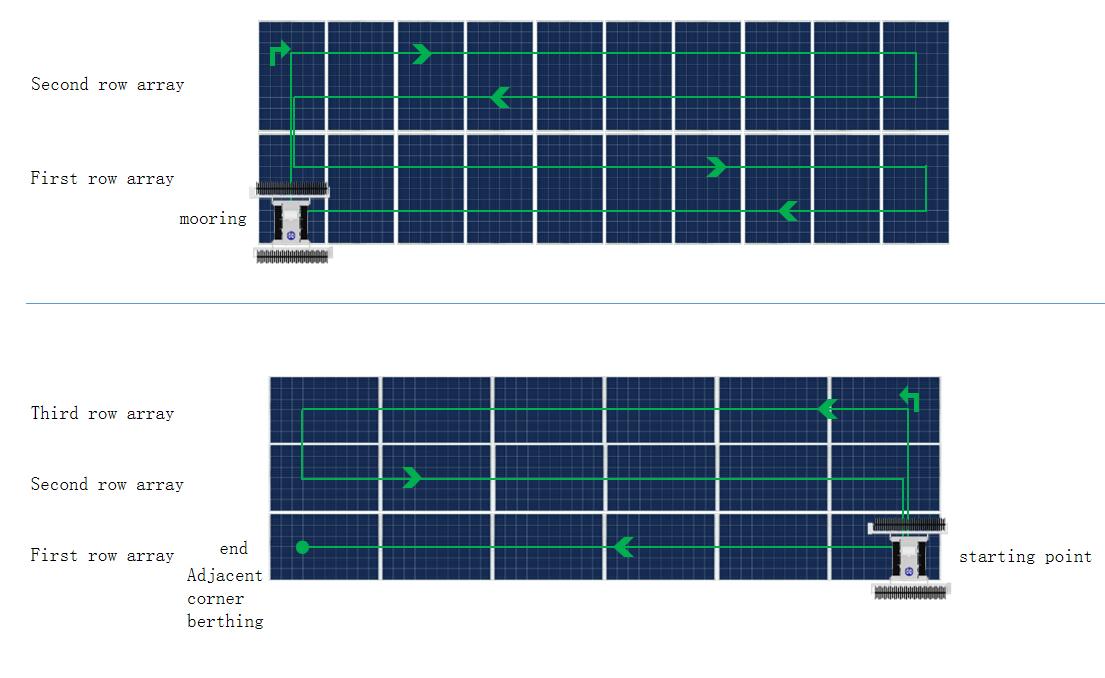
2.4.1 Trabajo autónomo
Después de completar la activación e identificación de la escena, suba a la parte superior de la matriz fotovoltaica de forma independiente y pruebe la dirección. Después de determinar la dirección, inicie la operación lateral, gire y camine a ambos lados de la matriz hasta que la matriz esté cubierta, y seleccione el punto final de acuerdo con el modo de estacionamiento.
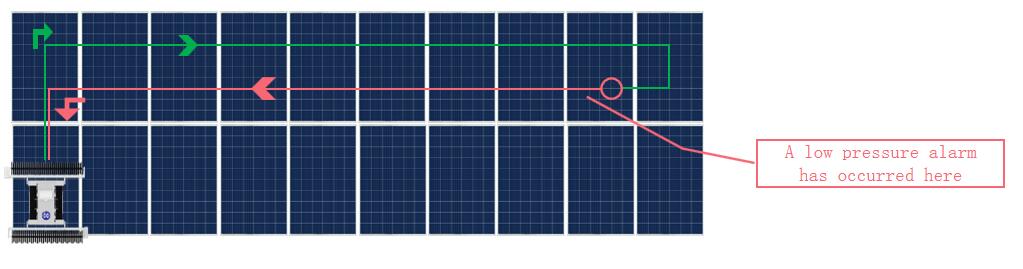
2.4.2 Retorno de baja presión
Cuando la energía de la batería es baja durante la operación autónoma, el dispositivo ingresará automáticamente al modo de regreso a casa de bajo voltaje y regresará a la posición inicial.
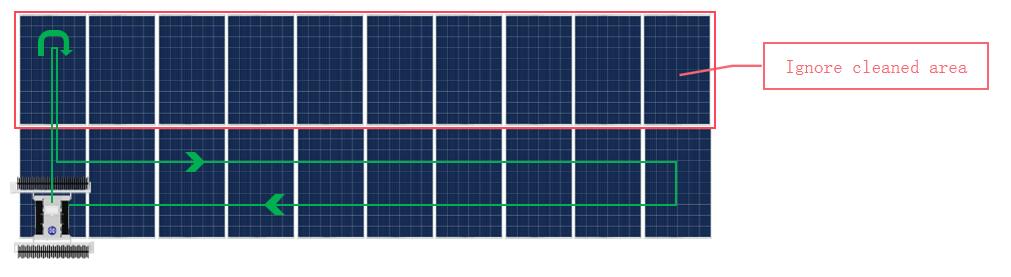
2.4.3 Continuación del Punto de Interrupción
Elija saltarse parte del área limpiada de forma independiente, busque la posición donde el último retorno de baja presión o el botón manual interrumpieron la operación y comience a continuar la operación desde allí.
Aviso:
2.5.1 Interacción básica
Visualización del estado del dispositivo y configuración de personalización del modo.

2.5.2 Modo de control remoto
Modo joystick y botón para el control manual del dispositivo

* El modo de control remoto es un modo dirigido con el propio dispositivo como sistema de coordenadas de referencia.
* en lugar del modo sin cabeza con un sistema de coordenadas geográficas o con referencia de operador.

Categorías
Blog nuevo
Para consultas sobre nuestros productos o lista de precios, déjenos en nuestras manos y nos pondremos en contacto dentro de las 24 horas.
 RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.
RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.





© Derechos de autor: 2026 Xiamen Wintop New Energy Tech Co., Ltd.. Reservados todos los derechos.

Compatible con red IPv6



